Quaternions
Algebraic Definition
Let $\mathbb{H}=\lbrace a+bi+cj+dk \mid a,b,c,d \in \mathbb{R}\rbrace$. There is a vector-space structure on $\mathbb{H}$:
Clearly $(\mathbb{H},+)$ is an abelian group, so $(\mathbb{H},+,\cdot)$ is an $\mathbb{R}$-linear space.
In addition, we define a multiplication operation on $\mathbb{H}$. First set:
Then multiplication is defined componentwise. To keep the notation lighter, the imaginary part can be written as a vector: $\vec{v}=(b,c,d)$. A quaternion can then be written as $x=[a,\vec{v}]=a+\vec{v}$; this is only notation, and does not mean we are adding a scalar and a vector.
From this definition, one can show that $\times$ is associative, but it is not commutative.
Next define the following, where $\ast$ denotes conjugation:
Similarly, $(\mathbb{H}^{\prime},+,\cdot)$ is also an $\mathbb{R}$-linear space. On this basis, define a multiplication structure on $\mathbb{H}^{\prime}$:
The multiplication on the right-hand side is ordinary matrix multiplication. What needs to be noted is that $\times$ is indeed closed; in other words, $AB$ really does still lie in $\mathbb{H}^{\prime}$. This can be checked by multiplying it out.
Since $(M\_{2 \times 2}(\mathbb{C}),+,\times)$ is a ring, that is, a $\mathbb{C}$-algebra, and since $\mathbb{H}^{\prime}$ is an abelian group under addition and is closed under multiplication, $\mathbb{H}^{\prime}$ is a subring of $(M\_{2 \times 2}(\mathbb{C}),+,\times)$. Therefore $\mathbb{H}^{\prime}$ is a $\mathbb{C}$-algebra, and hence also an $\mathbb{R}$-algebra.
Define a map $\phi$:
Proposition: $\phi$ is a bijection that preserves everything.
This is just a proof by definition. Preserving addition and scalar multiplication is easy. Preserving multiplication is a little more annoying, but it is enough to check multiplication on a basis. Under $\phi$, one basis maps as follows:
So it suffices to verify multiplication for these four images.
Thus $\mathbb{H}$ is an $\mathbb{R}$-algebra, and it is isomorphic to $\mathbb{H}^{\prime}$ as an $\mathbb{R}$-algebra.
Claim: $\mathbb{H}$ is a division algebra.
A division algebra means every nonzero element is invertible. To prove this claim, introduce an operation on $\mathbb{H}$ called conjugation:
Passing to $\mathbb{H}^{\prime}$, we get
One can check that for all $x,y \in \mathbb{H}$, $(xy)^\ast=y^\ast x^\ast$. So for any $x \in \mathbb{H}$, consider $xx^\ast$:
Therefore $xx^\ast$ is a real number. If $x=a+bi+cj+dk$, then:
So define the norm of $x$ by $\vert x \vert=\sqrt{xx^\ast }=\sqrt{a^2+b^2+c^2+d^2}$. From this it follows that $\vert x \vert=0 \Leftrightarrow x=0$. Now take any nonzero element $x$ of $\mathbb{H}$. We can directly construct its inverse:
Thus $x$ is invertible, so $\mathbb{H}$ is a division algebra, called the Hamilton quaternion algebra.
Property: $\vert x \vert ^2 = det(\phi(x))$, and therefore $\vert xy \vert = \vert x \vert \vert y \vert$.
This can be checked directly.
Now consider $Sp(1)$, defined as the set of all quaternions with norm $1$:
Quaternion multiplication on $Sp(1)$ gives a map $Sp(1) \times Sp(1) \rightarrow Sp(1)$. It is easy to check that the product of two norm-$1$ quaternions still has norm $1$, so this multiplication is well-defined.
One can check that $(Sp(1),\times)$ is a group. The identity is $1 \in Sp(1)$, and the inverse is $x^{-1}=x^\ast \in Sp(1)$. This group is called the unit quaternion group.
In terms of $\mathbb{H}^{\prime}$, this is actually $SU(2)$.
Introducing Topology
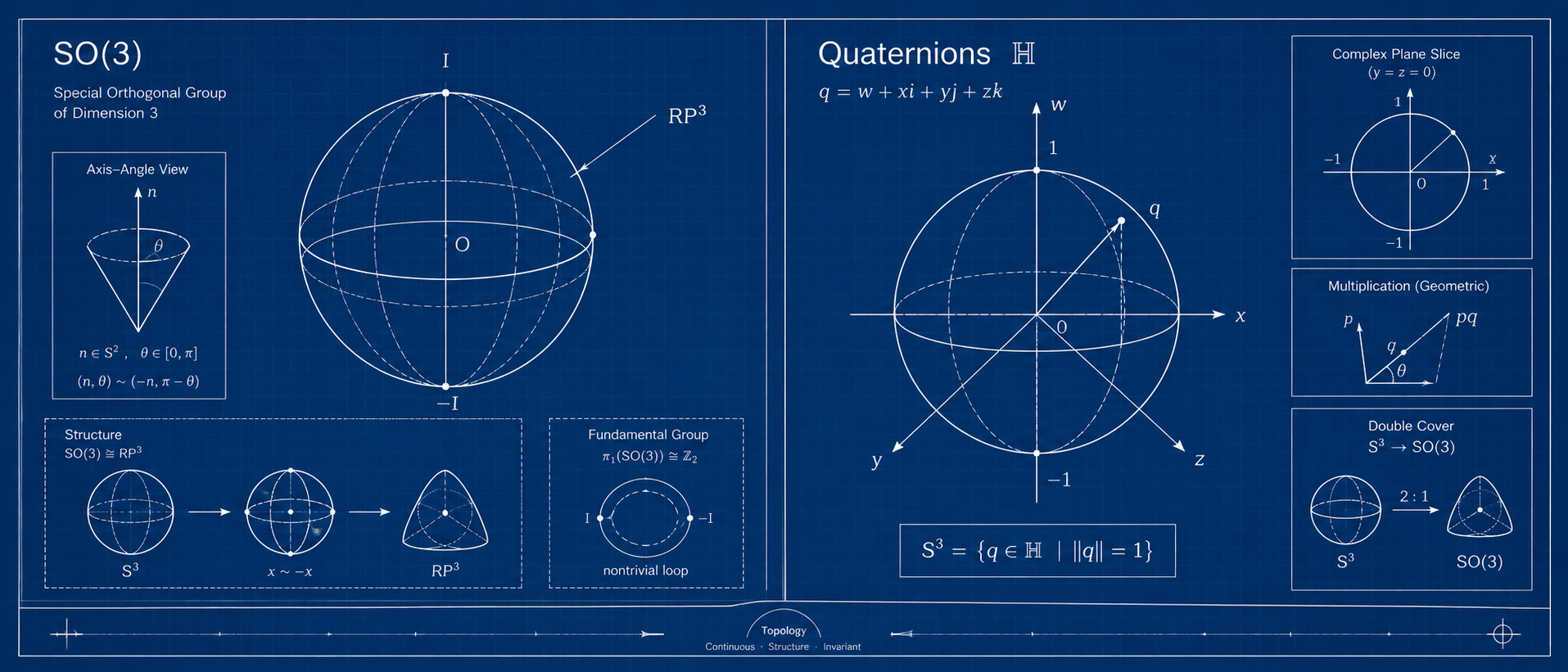
$Sp(1)=\lbrace x \in \mathbb{H} \mid \vert x \vert = 1 \rbrace$ embeds into $R^4$ via the map $\tau$, defined by:
The subspace of $R^4$ satisfying $a^2+b^2+c^2+d^2=1$ is $S^3=\lbrace (x,y,z,w) \mid x^2 + y^2 + z^2 + w^2 = 1\rbrace$. In other words, $Sp(1)$ is homeomorphic to $S^3$.
We can give $Sp(1)$ the subspace topology inherited from the Euclidean topology on $R^4$. Under this topology, $(Sp(1),\times)$ is a topological group.
Being a topological group means proving that $Sp(1) \times Sp(1) \rightarrow Sp(1):(x,y) \rightarrow xy$ and $Sp(1) \rightarrow Sp(1) : x \rightarrow x^{-1}$ are both continuous maps. It is enough to view everything inside the subspace of $R^4$ and prove that each component is continuous; essentially, they are all combinations of polynomials.
Since $Sp(1)$ is homeomorphic to $S^3$, $S^3$ can also be given a group structure.
Remark
Among the unit spheres ${S^n}\_{n \geq 1}$, only $S^1$ and $S^3$ admit topological group structures. The proof is not easy.
An Important Group Homomorphism
Next, construct a surjective topological group homomorphism $\theta :Sp(1) \rightarrow SO(3)$.
First define a pure quaternion: a quaternion whose real part is $0$. Let $Im \mathbb{H}$ denote the set of all pure quaternions.
For any $x=bi+cj+dk \in Im \mathbb{H}$, we can compute $x^2=-b^2-c^2-d^2$, which is a non-positive real number. In fact, the condition $x^2 \leq 0$ already characterizes exactly the pure quaternions; that is, $Im \mathbb{H}=\lbrace x \in \mathbb{H} \mid x^2 \leq 0\rbrace$.
This if-and-only-if statement follows directly from the definition of multiplication.
Define a map $\theta\_x:Im \mathbb{H} \rightarrow Im \mathbb{H}$:
The right-hand side uses quaternion multiplication, so it certainly lies in $\mathbb{H}$. Now look at $(xyx^{-1})^2=xy(x^{-1}x)yx^{-1}=xy^2x^{-1}$. Since $y^2$ is a real number, it can be moved to the front in the multiplication: $xy^2x^{-1}=y^2xx^{-1}=y^2 \leq 0$. Therefore the right-hand side also lies in $Im \mathbb{H}$.
Moreover, $\theta\_x$ is a linear map; this is easy to verify.
There are also two simple properties:
- $\theta\_x \circ \theta\_y = \theta\_xy,xy \in Sp(1)$
- $\theta\_{x^{-1} }=(\theta\_x)^{-1}$
By property 2, the inverse map has already been constructed, so $\theta\_x$ is invertible.
Since $Im \mathbb{H}$ has the basis $\lbrace i,j,k \rbrace$, $\theta\_x$ has a representation with respect to this basis. And since $Im \mathbb{H}$ is isomorphic to $R^3$, $\theta\_x$ also has a corresponding matrix representation. Define $\theta :Sp(1) \rightarrow GL\_3(R):x \rightarrow \theta\_x$.
Then property 1 above tells us that $\theta$ is a group homomorphism.
Next, prove that $\theta\_x$ actually lands in $SO(3)$.
Step1: Prove that $\theta\_x$ lands in $O(3)$.
$\theta\_x:Im \mathbb{H} \rightarrow Im \mathbb{H}$ is isomorphic to $R^3$, so it has a matrix representation under the basis $\lbrace i,j,k \rbrace$. We can also define an inner product $\langle\cdot , \cdot\rangle:Im \mathbb{H} \times Im \mathbb{H} \rightarrow R$ as the standard inner product:
This inner product likewise induces a norm: for all $y \in Im \mathbb{H}$, $\vert \vert y \vert \vert = \sqrt{\langle y,y\rangle}$. Under this inner product, $\lbrace i,j,k \rbrace$ is the standard orthonormal basis. Therefore, to prove that $\theta\_x$ lands in $O(3)$, it is enough to prove that $\theta\_x$ preserves the inner product, which is the same as proving that it preserves the norm. That is, for all $y \in Im \mathbb{H}$, we need $\vert \vert \theta\_x(y) \vert \vert = \vert \vert y \vert \vert$. For any $y \in Im \mathbb{H}$, its norm is exactly its length as a quaternion: $\vert \vert y \vert \vert = \vert y \vert$. So it is enough to prove $\vert \theta\_x(y) \vert = \vert y \vert$. Indeed, $\vert \theta\_x(y) \vert=\vert xyx^{-1} \vert=\vert x \vert \vert y \vert \vert x^{-1} \vert=\vert y \vert$. Therefore, $\theta\_x$ lands in $O(3)$.
Step2: Prove that $\theta(Sp(1)) \subset SO(3)$
Since we already know $\theta\_x$ lands in $O(3)$, we have $det(\theta(Sp(1))) \subset \lbrace 1, -1 \rbrace$. The goal is to prove that the image can only be $1$, namely $det(\theta(Sp(1)))=1$. The proof has two parts: first prove the continuity of the composite function $det \circ \theta:Sp(1) \rightarrow O(3) \rightarrow \mathbb{R}$, then use connectedness to show that the determinant can only be $1$. Finally, prove that $\theta$ is a surjective homomorphism.
Step1: $det \circ \theta$ is continuous:
In fact, $\theta$ maps from $Sp(1)$ to $GL(3)$, and $GL(3)$ is isomorphic to $R^{3^2}$. Checking continuity component by component is enough, since the components are all combinations of polynomials. The determinant operation is also continuous, so their composite is continuous as well. Hence $\theta$ is also a topological group homomorphism.
Step2: The determinant can only be 1:
Notice that $Sp(1)$ is homeomorphic to $S^3$, and $S^3$ is connected. Since the composite function $det \circ \theta$ is continuous, its image is connected too.
Since $\theta\_x$ lands in $O(3)$, we have $det(\theta(Sp(1))) \subset \lbrace 1, -1 \rbrace$. Because $det(\theta(Sp(1)))$ is connected, the image set is either $\lbrace 1 \rbrace$ or $\lbrace -1 \rbrace$. Now $det(\theta (1))$ is the determinant of the identity transformation, so $1$ is attained. This shows that $det(\theta(Sp(1)))$ can only be $\lbrace 1 \rbrace$.
For Step3, first examine a few properties of $\theta$:
- $Ker(\theta)=\lbrace 1, -1 \rbrace$
By the definition of the kernel, for any $x \in Ker(\theta)$, we have $\theta\_x(y)=y$ for all $y \in Im \mathbb{H}$. Since $Im \mathbb{H}$ is isomorphic to $R^3$, it is enough to prove the equality on a basis. That is, $\theta\_x(i)=i$, $\theta\_x(j)=j$, and $\theta\_x(k)=k$. These equalities can be obtained directly from the definition of quaternion multiplication.
- $Img(\theta)=SO(3)$
Step3:
As a group, $\lbrace 1,-1 \rbrace$ is clearly a normal subgroup. By the first isomorphism theorem for groups, $Sp(1) / \lbrace 1,-1 \rbrace \cong SO(3)$. As a topological group, we first need to clarify whether the quotient group of a topological group is still a topological group. Lemma: Let $G$ be a topological group, let $H \lhd G$, and let $H$ be a closed subgroup. Then $G/H$ is a topological group under the quotient topology.